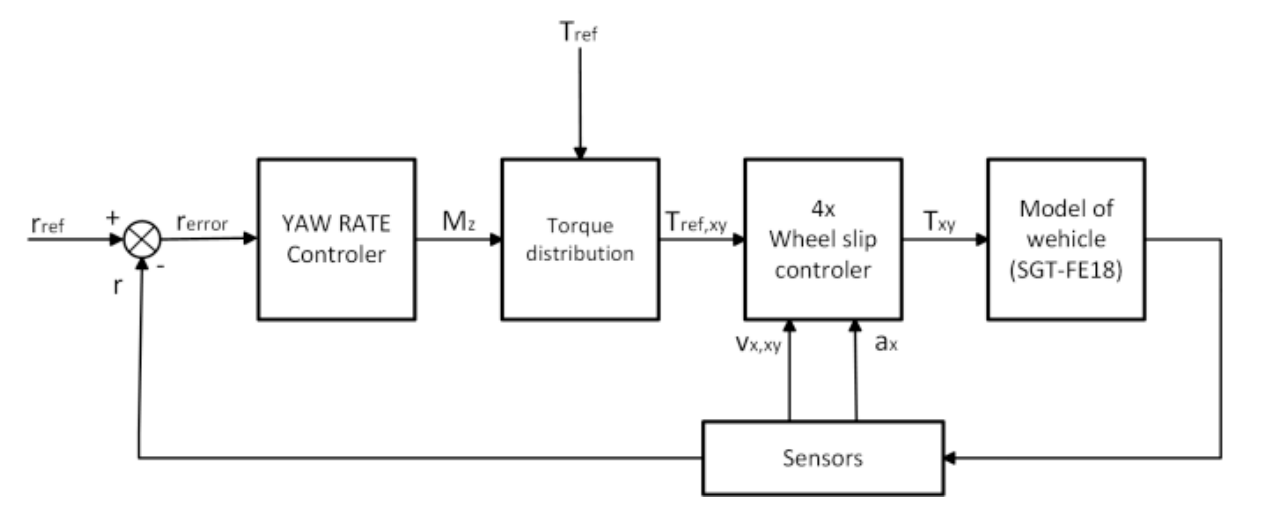
A common approach: yaw-rate vectoring. Take the yaw rate (the rotational speed of the car on the z-axis) and create a yaw moment: , where is the moment of inertia.
Just by figuring out this moment, we can apply different torques to wheels to apply that counter momentum. (Source)
Wheel slip;